双头吸泵
适配型号:myCobot 280、myPalletizer 260、mechArm 270
产品图示

规格说明
| 名称 | 双头吸泵 |
|---|---|
| 型号 | myCobot_DualPump_grey |
| 材料 | 光敏树脂/尼龙7100 |
| 颜色 | 白+黑 |
| 尺寸 | 吸泵末端:63x24.5x26.7 |
| 吸盘数量 | 2 |
| 吸盘尺寸 | 直径20mm |
| 吸取重量 | 150g |
| 动力源设备 | 吸泵盒 |
| 使用寿命 | 一年 |
| 固定方式 | 乐高连接件 |
| 控制接口 | IO控制 |
| 使用环境要求 | 常温常压 |
| 适用设备 | ER myCobot 280 系列, ER myPalletizer 260 系列 ,ER mechArm 270 系列 ,ER myBuddy 280 系列 |
吸泵 : 吸附物体使用
简介
吸泵,即真空吸附泵,具备一进一出的抽气嘴、排气嘴各两个,相对于单头吸泵更为稳定,它结构简单、体积小巧、使用方便、噪音较低、并有良好的自吸能力等优点。通过控制吸泵套件作为机械臂的末端执行器,执行吸附物体的功能。
吸泵配件:电源线 x1、杜邦线 x10、一入两出连接线 x1、乐高科技件 x若干
工作原理
- 吸取物品时:气泵启动抽气吸附物品即可停止,短时不会漏气。
- 放下物品时:电子阀门启动,泄气阀门打开,空气进入真空吸盘脱离被吸物品。
适用物体
- 纸片/塑料片
- 平面光滑物体
- 卡片等
安装图示(以M5版本为例):

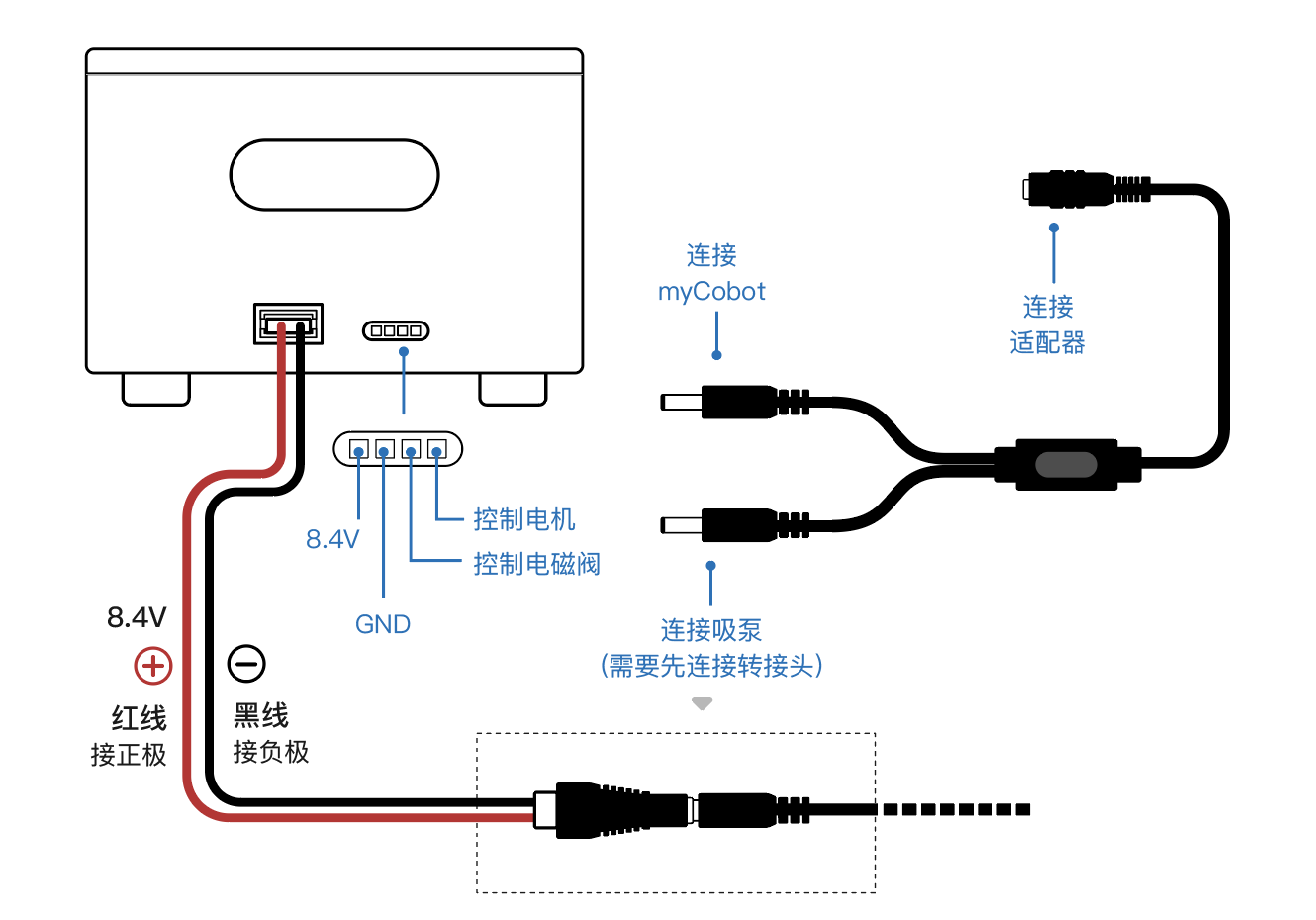
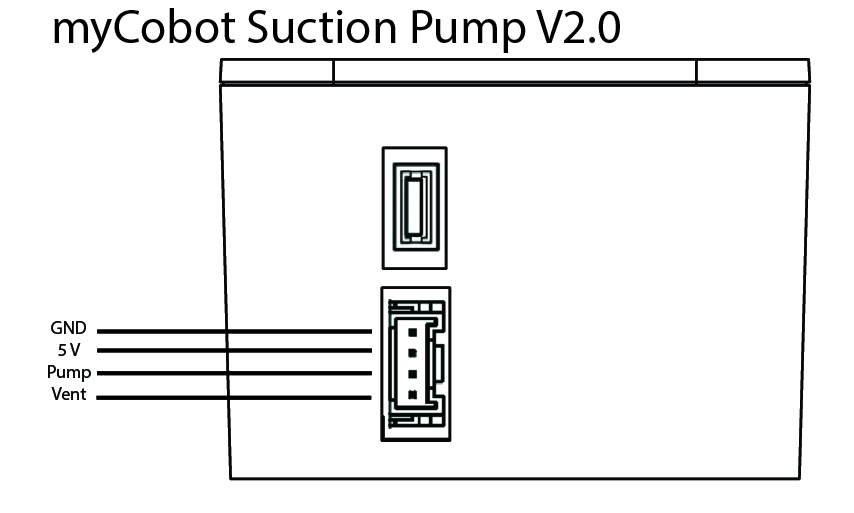
接线示意图
吸泵 v1.0
吸泵 v2.0
产品安装教程文字
第一步: 母头线--电源线端连接吸泵左边的端口,另一端连接一入两出线出口端,另外出口端连接机械臂电源口,入口端连接电源适配器。
第二步: 杜邦线的插针端连接(接线示意图)注释的控制电机和电磁阀的接口,另一端连接机械臂G2、G5引脚(M5)20、21引脚(Pi)。
第三步: 使用乐高科技件将吸泵头固定在机械臂末端。
注意事项
- 请确保产品已经按照说明连接成功
- 请确保产品供电为附带适配器供电
- 请确保电源适配器能正常工作
- 请确保正负极的接入方向
Python环境下使用吸泵:
- 280-M5版本:
from pymycobot.mycobot import MyCobot
import time
# 初始化一个MyCobot对象
mc = MyCobot("COM3", 115200)
# 开启吸泵,注意:引脚2和5使用其中一个即可控制吸泵的开关
def pump_on():
# 让2号位工作
mc.set_basic_output(2, 0)
# 让5号位工作
#mc.set_basic_output(5, 0)
# 停止吸泵
def pump_off():
# 让2号位停止工作
mc.set_basic_output(2, 1)
# 让5号位停止工作
#mc.set_basic_output(5, 1)
pump_off()
time.sleep(3)
pump_on()
time.sleep(3)
pump_off()
time.sleep(3)
- 280-Pi版本:
from pymycobot.mycobot import MyCobot
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
import time
import RPi.GPIO as GPIO
# 初始化一个MyCobot对象
mc = MyCobot(PI_PORT, PI_BAUD)
# 初始化
GPIO.setmode(GPIO.BCM)
# 引脚20/21任意一个都能控制吸泵的开关,注意:开关应使用同一个引脚控制
GPIO.setup(20, GPIO.OUT)
#GPIO.setup(21, GPIO.OUT)
# 开启吸泵
def pump_on():
# 开吸泵
GPIO.output(20,0)
#GPIO.output(21,0)
# 停止吸泵
def pump_off():
# 关吸泵
GPIO.output(20,1)
#GPIO.output(21,1)
pump_off()
time.sleep(3)
pump_on()
time.sleep(3)
pump_off()
time.sleep(3)
更多案例参考和运行结果视频请查看 使用案例
淘宝链接:
暂无...